HPJM-RE50-60-PRO-XX Robot Ortak Motoru
P/N Yorumu

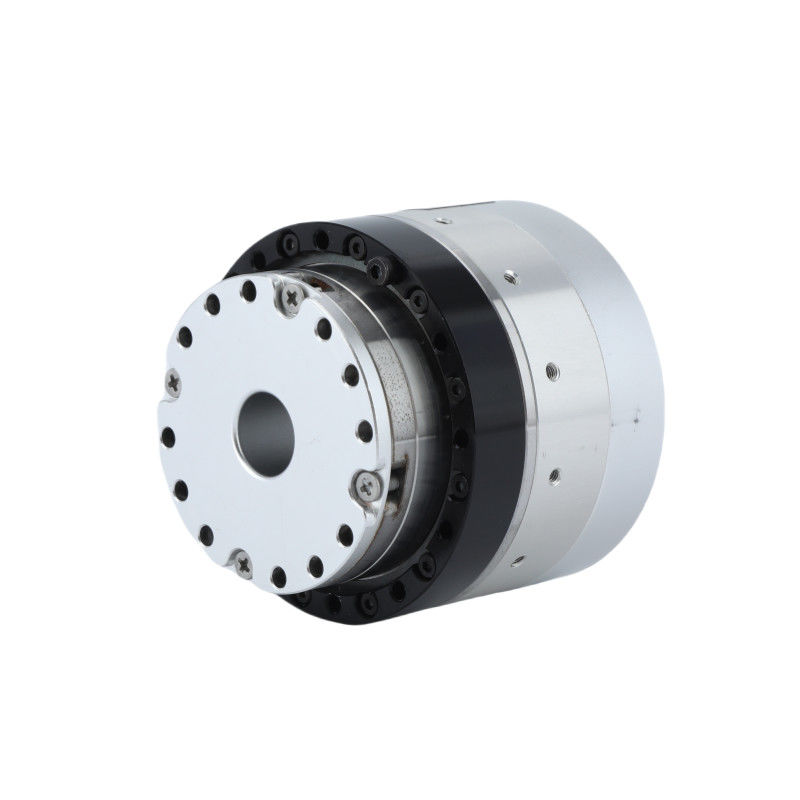
Ürün Tanımı
Bir robot eklem motoru, bir robot kolunun veya benzer sistemlerin hareketini güçlendiren kritik bir bileşendir.Tıpkı hassasiyet gibi., tork, hız ve güvenilirlik.
Döner aktüatörünüz zaten yüksek hassasiyet için bir motor, dişli kutusu ve kodlayıcı birleştirdiğinden, robotik eklem uygulamaları için çok uygundur.
Robot eklemleri, bazen eksen olarak da bilinir, robotun komşu bağlantılar arasında göreceli harekete neden olan hareketli parçalarıdır.Bu bağlantılar, eklemlerin düzgün ve basit çalışmasını sağlamak için birbirine bağlanan katı bileşenlere atıfta bulunur.
Özellikleri
1Mükemmel performans.
Yüksek aşırı yük kapasitesine sahip, istikrarlı çalışma ve daha doğru ve güvenli güç kontrolü için tork motoru.
Çift mutlak değerli yüksek hassasiyetli çoklu daire kodlayıcısı, yüksek çıkış doğruluğunu ve tekrarlanan konumlandırma doğruluğunu 0.001° sağlamak için yapılandırılmıştır.
Çok dönüşlü çift mutlak değer kodlayıcısı + tork motoru + yüksek sertlik harmonik redüktörü sanal kuvvet kontrolünü gerçekleştiriyor.
Merkezi kablolama gereksinimlerini karşılamak için büyük boş şaft tasarımı, eklem yapısını daha kompakt hale getirir.
2Hafif.
Yüksek verimlilik: model tahminine dayalı vektör kontrol algoritması, düşük ısı etkisini korurken yüksek frekanslı hareket kontrolünü sağlar.
3Uzun ömür.
Pozisyonlama doğruluğu 0,015 °'den azdır ve tekrarlanan pozisyonlama doğruluğu 0,001 °'ye ulaşabilir.
4Kurulumu kolay.
6 farklı boyutlu eklem, robot vücut yapısına entegre edilmesi kolaydır.
5Sürdürülebilir
Düşük güç tüketimi, birçok ana marka kontrolörünü destekler.
Detaylı Resimler
Spesifikasyon sayfası
| Azaltma oranı |
51 |
81 |
101 |
| İsimlendirilmiş tork |
N · m |
7.2 |
11.6 |
11.6 |
| Başlangıç ve durma noktasındaki maksimum tork |
N · m |
20 |
25 |
30 |
| En yüksek tork |
N · m |
37 |
51 |
60 |
| DC otobüs voltajı 48VDC |
Adlık akım (alüminyum ısı alıcı ile) |
A |
3.6 |
| Maksimum akım |
A |
10.8 |
| İsimlendirilmiş hız |
RPM |
68 |
42 |
33 |
| En yüksek hız |
RPM |
90 |
56 |
45 |
| Mutlak kodlayıcı |
Kodlayıcı Tipi |
Boş mutlak çok dönüşlü kodlayıcı |
| Kodlayıcı çözünürlüğü (motör 1 dönüşü) |
17 bit |
| Motor çoklu devrim sayıcısı |
216(65.536) |
| Geri tepki |
Ark sec |
20 |
20 |
15 |
| 10Arc saniyede özelleştirilebilir |
| Kütle |
Frensiz |
Kilo |
0.37 |
| Uzunluk |
mm |
58.4 |
| Çukurdan |
mm |
12 |
| Kütle |
Frenli |
Kilo |
0.55 |
| Uzunluk |
mm |
78 |
| Çukurdan |
mm |
10 |
| Motorun maksimum sürekli gücü |
W |
150 |
| Besleme voltajı |
V |
24-48V |
| İletişim otobüsü |
Yapabilir |
| Motor yalıtımı |
Sıcaklığa direnç derecesi:F (((155°C) |
| İzolasyon direnci: 200M Ω ((DC500V) üzerinde |
| İzolasyon dayanıklılık voltajı: AC1500V ((1 dakika) |
| Koruma mekanizması (koruma seviyesi) |
Tamamen kapalı ve kendi kendine soğutma ( Varsayılan IP50, özel özelleştirilmiş IP65, IP67, IP68) |
| Düğüm oranı |
En yüksek tork |
Orta yükte maksimum izin verilen tork (N.m) |
2000 RPM'de nominal tork (N.m) |
En yüksek hız
(RPM) |
Belirli Hız
(Nitelikli torkun yarısı ile)
(RPM) |
Donanım Geri Çözümü
(arcsec) |
| 51 |
23 |
8.6 |
6.6 |
97 |
75 |
20 |
| 81 |
29 |
13.5 |
9.6 |
61 |
46 |
20 |
| 101 |
34 |
13.5 |
9.6 |
49 |
37 |
10 |
| |
Adlık Güç
(W) |
Güçlendirme Voltajı
(V) |
Maksimum Sürekli Akım
(A) |
Rütbeli Akım
(A) |
Direniş
(Ω) |
Kodlayıcı çözünürlüğü
(Bit) |
İletişim otobüsü |
| 150 |
24-48 |
5 |
3.6 |
0.47 |
17 |
Yapabilir |
| |
Döngü Sabiti
(Nm/A) |
İndüktansa
(mH) |
Pole-pair sayısı |
Çürük Şaktı
(mm) |
Uzunluk
(mm) |
Kütle
(kg) |
Dayanıklılık
(g*cm)2) |
| 0.089 |
0.215 |
10 |
10 |
82±0.5 |
0.59 |
146 |
Uygulama
|
|
|
| Robotlar ve Dronesnh |
İşbirliği Yapan Robot Kolu |
Otomatik Üretim Hatları |
|
|
|
| CNC makineleri |
Tıbbi Cihazlar |
AGV Lojistik |

 Mesajınız 20-3.000 karakter arasında olmalıdır!
Mesajınız 20-3.000 karakter arasında olmalıdır!